Le système français CASSIOPÉE, un dispositif de pointage précis aux utilisations multiples
Lorsqu’on parle du contrôle d’un ballon, d’une fusée ou d’un satellite en vol, on entend généralement la connaissance de leur trajectoire et la mise en œuvre de moyens qui permettent de les repérer puis de les suivre dans l’espace. Au-delà de ce premier aspect et dès qu’il s’agit d’une expérience scientifique, il devient presque toujours indispensable de commander également les mouvements du mobile sur lui-même, autour de ses axes, pour tirer des données acquises le maximum d’informations utiles. Il est très rare en effet que la direction de visée des dispositifs embarqués soit indifférente pour la connaissance d’un phénomène. Plus l’expérience est complexe, plus le contrôle de ces mouvements prend d’importance aux yeux de l’expérimentateur.
Ce besoin général a été ressenti en France de façon d’autant plus immédiate que le programme national consacre une part notable aux expériences d’astronomie spatiale.
Pour permettre de premières expériences, le CNES a d’abord utilisé le système américain A.C.S. monté sur fusée Véronique. Parallèlement, une enquête faite par le CNES auprès des spécialistes susceptibles d’utiliser des dispositifs de contrôle d’attitude montrait quels étaient leurs souhaits en la matière ; elle confirmait que les systèmes disponibles, déjà mis au point en France ou à l’étranger, n’avaient très généralement pas les performances souhaitables ou encore qu’il s’agissait de systèmes conçus pour une utilisation bien déterminée et que leur emploi nécessitait donc des adaptations répétées, longues et coûteuses.
Au contraire, le dispositif français CASSIOPÉE (Contrôle d’Attitude par Senseurs Stellaires et Inertiels pour l’Orientation et le pointage d’Expériences sur les Etoiles), dont le premier essai technologique en vol aura lieu au cours du mois d’octobre 1968, a été conçu pour offrir des possibilités d’emploi très larges, pour lesquelles il conserve des qualités de précision, de rapidité d’action et de souplesse très remarquables.
Composé de blocs cylindriques indépendants qui peuvent, par simple changement du diamètre de leur structure, être montés à bord de la plupart des grosses fusées-sondes, le système CASSIOPÉE est en effet capable, après avoir été séparé de la fusée porteuse, de mettre un terme à la rotation de la pointe scientifique sur elle-même en fin de propulsion, d’orienter rapidement cette pointe dans n’importe quelle direction de l’espace fixée à l’avance et de lui conserver cette orientation, ceci pendant quelque 600 secondes, avec une précision atteignant une minute d’arc et en utilisant n’importe quelles références extérieures (solaire, lunaire, stellaires,…)
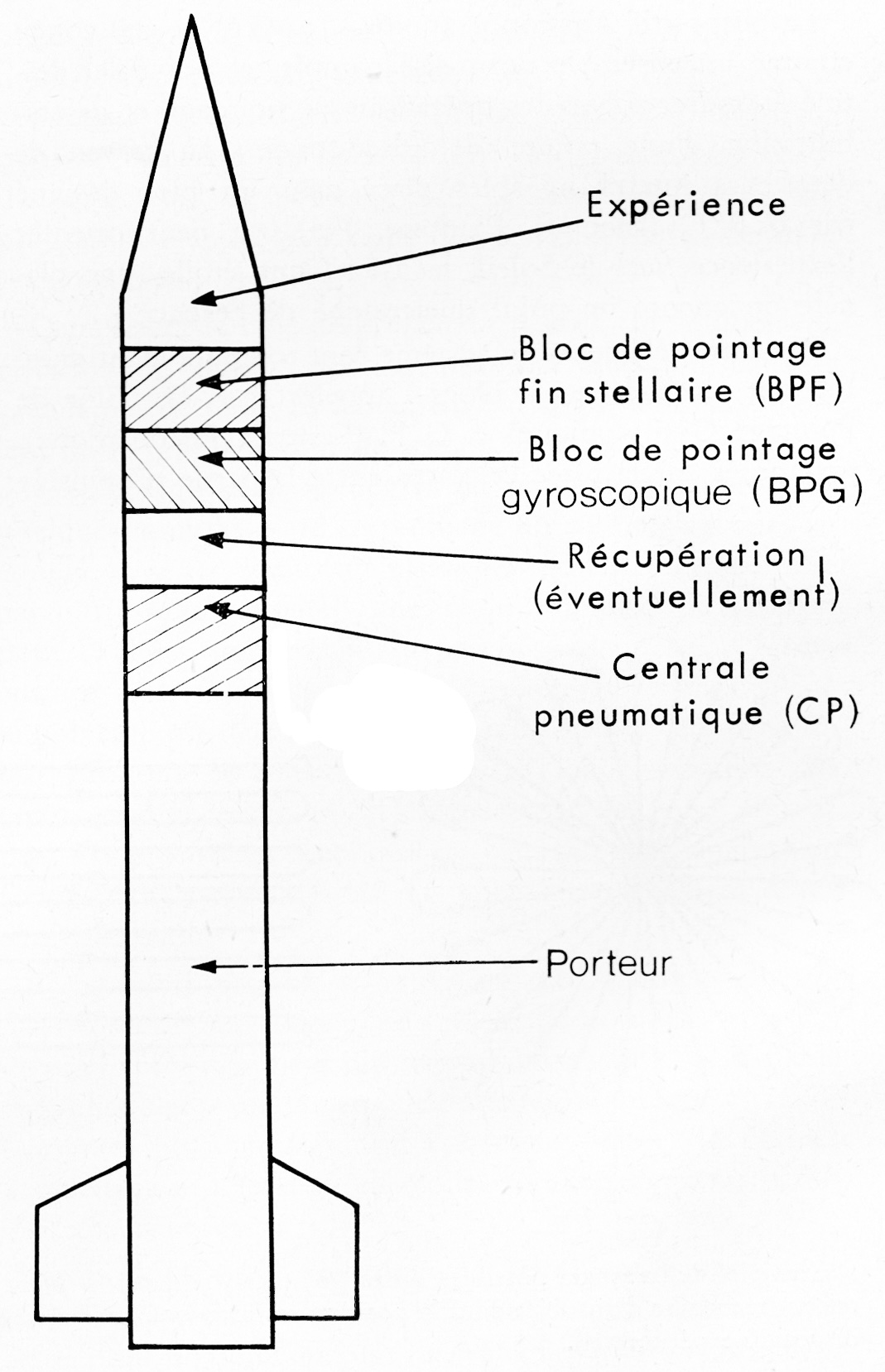
Figure 1 – Schéma d’un montage classique du système CASSIOPÉE
Description. Performances
Le dispositif CASSIOPÉE (poids, 103 kg) a été conçu comme un ensemble normalisé complet et universel destiné à assurer toutes les opérations de pointage et de stabilisation d’une pointe de fusée-sonde ; au moyen de détecteurs interchangeables placés dans un bloc désigné Bloc de Pointage Fin (B.P.F.), on peut orienter l’expérience vers le Soleil, la Lune, une étoile, une planète ou encore un point quelconque de l’espace.
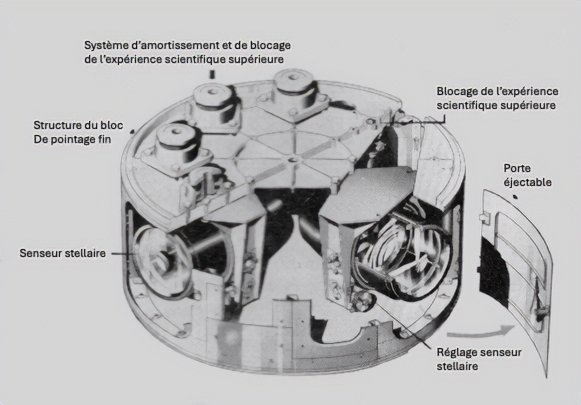
Figure 2 – Le bloc de pointage fin
Figure 3 – Structure du bloc de pointage fin, avec les 2 fenêtres de détection stellaire, obstruées par des portes éjectables
Les autres éléments du système sont toujours identiques. Ils sont répartis en 2 « blocs » appelés Bloc de Pointage Gyroscopique (B.P.G.) et Centrale Pneumatique (C.P.), juxtaposés sur la fusée et placés entre la partie propulsive et la pointe expérimentale, ou encore séparés par un caisson de récupération si le programme prévoit le retour à terre de la pointe ; dans ce cas, seule la partie essentielle du système – la plus coûteuse – sera récupérée pour utilisation ultérieure.
Si en effet le premier compartiment (B.P.F?) assure la détection extérieure, l’acquisition des objets visés, les calculs correspondants et l’élaboration des ordres qui sont donnés à la centrale pneumatique (C.P.) constituent l’essentiel de la tâche du deuxième bloc (B.P.G.).
Le B.P.G. comporte ainsi :
- une centrale gyroscopique à 3 axes, très élaborée, à laquelle on confie avant le départ la direction du pointage et qui la conserve à environ un degré près autour de chacun des trois axes (précision limite due à la dérive des gyroscopes pendant la phase propulsée du vol sur une fusée Eridan) ; la direction de pointage, qui peut être absolument quelconque, est affichée quelques minutes seulement avant la mise à feu ; on peut également introduire rapidement aux derniers instants toutes les corrections imposées par les conditions réelles (heure exacte, inclinaison de la rampe, etc.) ;
- un calculateur qui traduit les différences constatées dans l’orientation de la fusée par rapport à celle des gyroscopes-repères en ordres d’ouverture ou de fermeture des électrovannes alimentant les tuyères de correction d’attitude ; cet ensemble de calcul comporte en réalité trois calculateurs identiques, un pour chaque axe ;
- des équipements de servitude associés : l’alimentation du système est assurée par une batterie de 28 volts qui permet un fonction autonome de 15 minutes au moins ;
- le convertisseur statique alimentant la centrale gyroscopique et le calculateur.
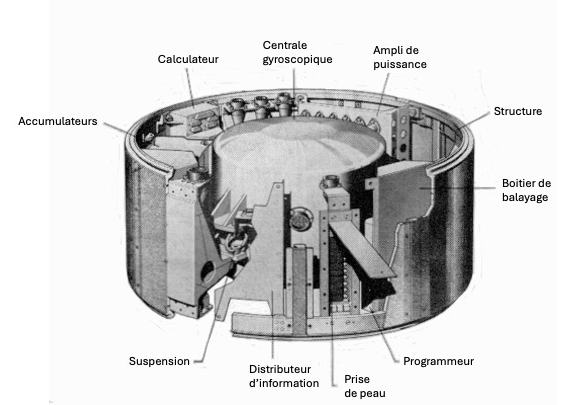
Figure 4 – Vue schématique du bloc de pointage gyroscopique
Figure 5 – Vue de la face avant du bloc de pointage gyroscopique
Le système de télémesure de l’ensemble CASSIOPÉE, dont le commutateur, situé dans le B.P.G., est relié à l’émetteur du caisson d’équipements standards, est prévu pour transmettre les informations des gyroscopes, celles des détecteurs de pointage fin, la suite des ordres du programmateur et les valeurs de pressions dans la centrale pneumatique.
Complétant le bloc de pointage grossier, un équipement électronique annexe peut assurer, par injection dans le calculateur de tensions variables, le « balayage » lent de la pointe autour de ses 3 axes, avec une amplitude de dépointage de ± 90 degrés en pointage grossier et de quelques minutes d’arc en pointage fin ; il ne s’agit pas là, comme avec les dispositifs classiques de balayage, de faire parcourir à un appareil une région donnée de l’espace pour l’aider à cerner le point précis sur lequel il se fixera ensuite, mais d’un dispositif qui entre enjeu au moment où le pointage est déjà acquis et qui n’est utilisé que dans un but proprement scientifique, pour l’étude détaillée des contours d’un objet, pour le repérage d’un point dont la position précise est inconnue ou encore pour l’analyse en fonction de la distance des rayonnements provenant d’une source étendue.
Il est aussi possible à n’importe quelque moment du vol mais toujours au cours d’une phase de pointage grossier, de viser successivement plusieurs points, avec pose variable dans chaque cas ou de parcourir une région prévue à vitesse constante ou à accélération constante, selon des tracés géométriques différents (en étoile, en aller et retour parallèle, en croix, etc.).
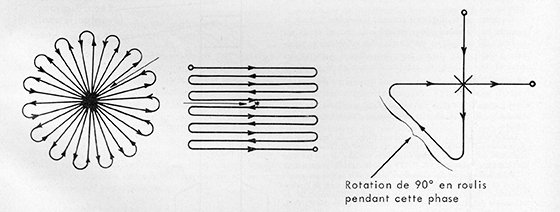
Figure 6 – Exemples de balayages possibles, après pointage; degauche à droite, balayage radial (analyse d’une source étendue), balayage en aller et retour (recherche d’un objet dont la position est inconnue) et balayage en croix (étude détaillée d’un objet, avec fente d’analyse dans le dispositif expérimental).
Le B.P.G. peut être complété, selon les besoins, par le B.P.F., bloc de détection spécialisé avec calculateur auxiliaire, pour un pointage plus fin, venant parfaire la première orientation obtenue par l’alignement gyroscopique ; les détecteurs proprement dits peuvent aussi être intégrés à la charge scientifique elle-même.
La centrale pneumatique renferme le réservoir de gaz sous pression – 3 kg d’azote ou de néon – les détendeurs et les électrovannes qui alimentent 16 petites tuyères disposées régulièrement autour de la fusée pour permettre tous les mouvements voulus autour des 3 axes.
C’est immédiatement derrière cette centrale pneumatique que se trouve le système de séparation pointe/propulseur.
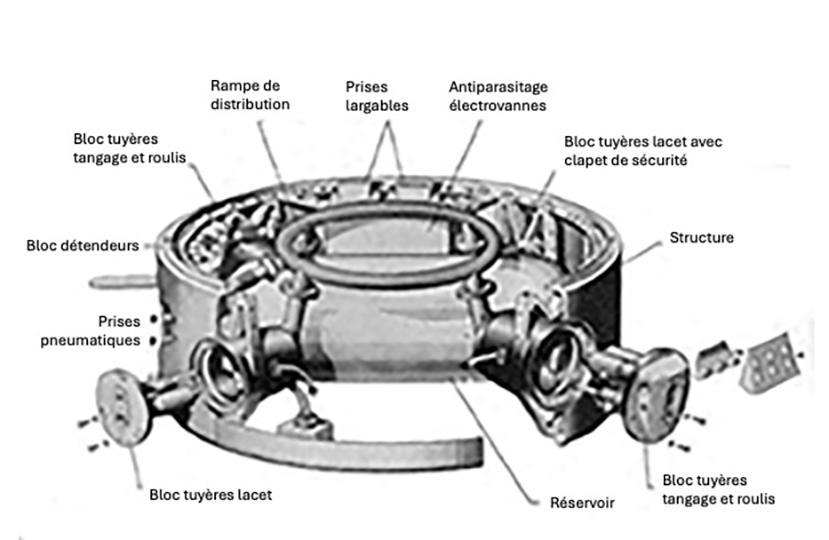
Figure 7 – Vue schématique bloc pneumatique
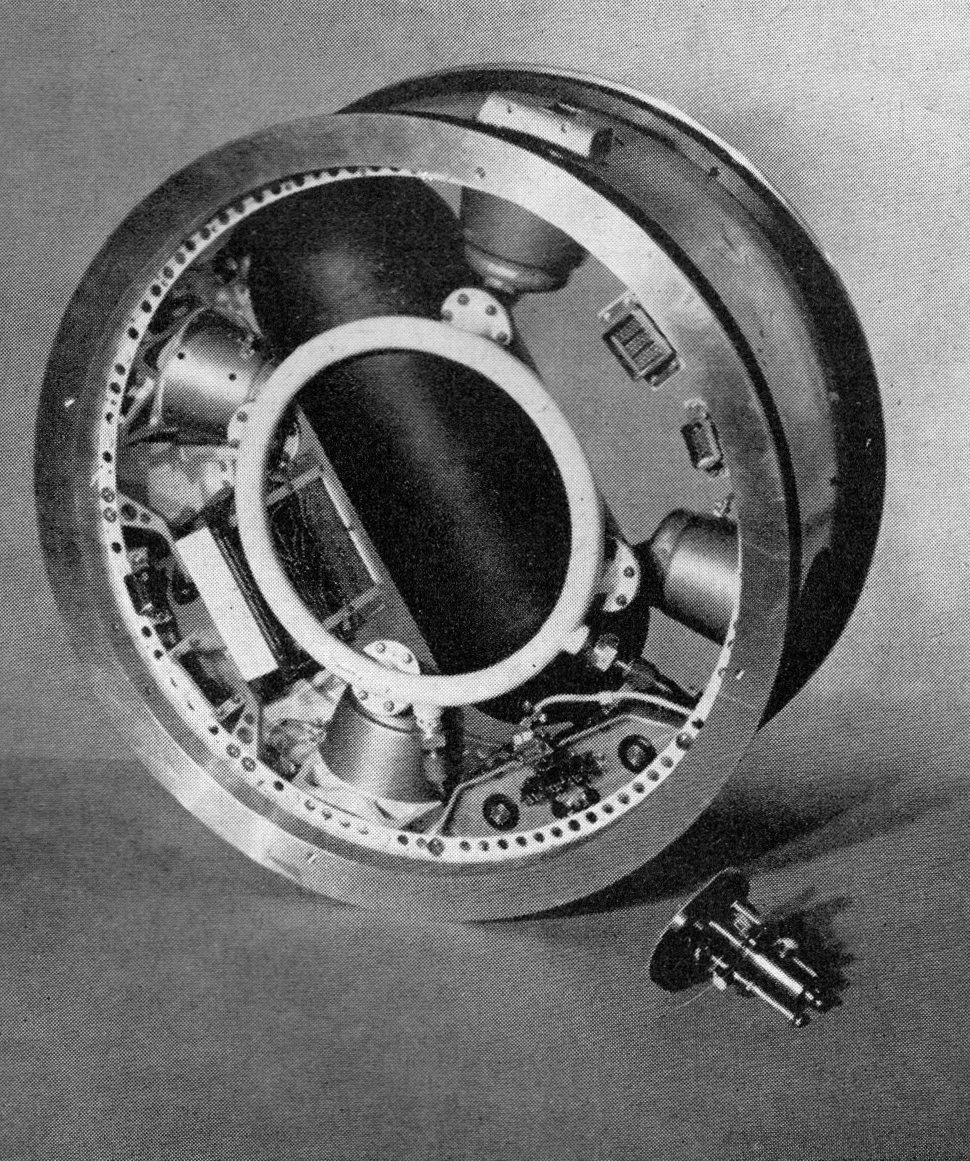
Figure 8 – La centrale pneumatique et un des blocs d’électrovannes.
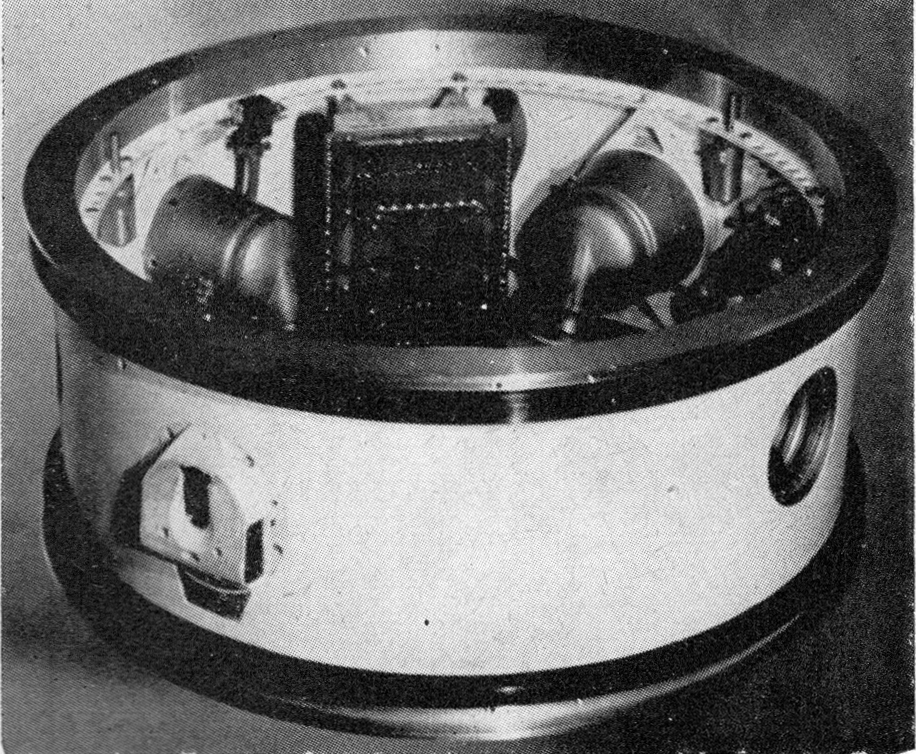
Figure 9 – La centrale pneumatique : un des blocs de tuyères est en place ; sur la couronne supérieure, 2 des 4 poussoirs de séparation entre la pointe de la fusée et le propulseur.
Fonctionnement
Le système peut donc être utilisé en pointage grossier ou en pointage fin. La suite des opérations est réglée par le programmeur digital interne selon une séquence qui peut comporter des combinaisons multiples, soit simplement un pointage dit grossier, à un degré près, soit encore un pointage fin, avec une précision de l’ordre de la minute d’arc, selon les 3 axes et en s’appuyant sur n’importe quelle référence extérieure. En fonction de la mise à profit plus ou moins poussée de toutes les capacités du système, on distingue ainsi 4 types de performances :
- un pointage grossier selon 2 des 3 axes, ceux de tangage et de lacet, avec une centrale gyroscopique simplifiée ; on peut ainsi contraindre la pointe à balayer tout le ciel visible en un point, et cela à une vitesse connue ;
- un pointage fin selon 2 axes ; il suffit par exemple qu’un détecteur stellaire ou solaire « accroche » l’axe de visée ; l’attitude de la pointe sera alors assurée à 1 mn près en tangage et en lacet et à 1 degré près, en roulis par exemple ;
- un pointage fin triaxial : pour obtenir que les 3 axes soient contrôlés avec la même précision, on mettra en œuvre non plus un mais deux détecteurs fins ; dans le cas d’un pointage fin, il est bien entendu indispensable que les axes de visée des dispositifs expérimentaux aient été « calés » avec une précision supérieure à celle qui est finalement recherchée pour l’orientation, par rapport aux directions de visée des détecteurs ; c’est cette opération très délicate qui explique d’ailleurs que les ensembles de détection soient intégrés non pas au système CASSIOPÉE lui-même mais directement à la charge scientifique.
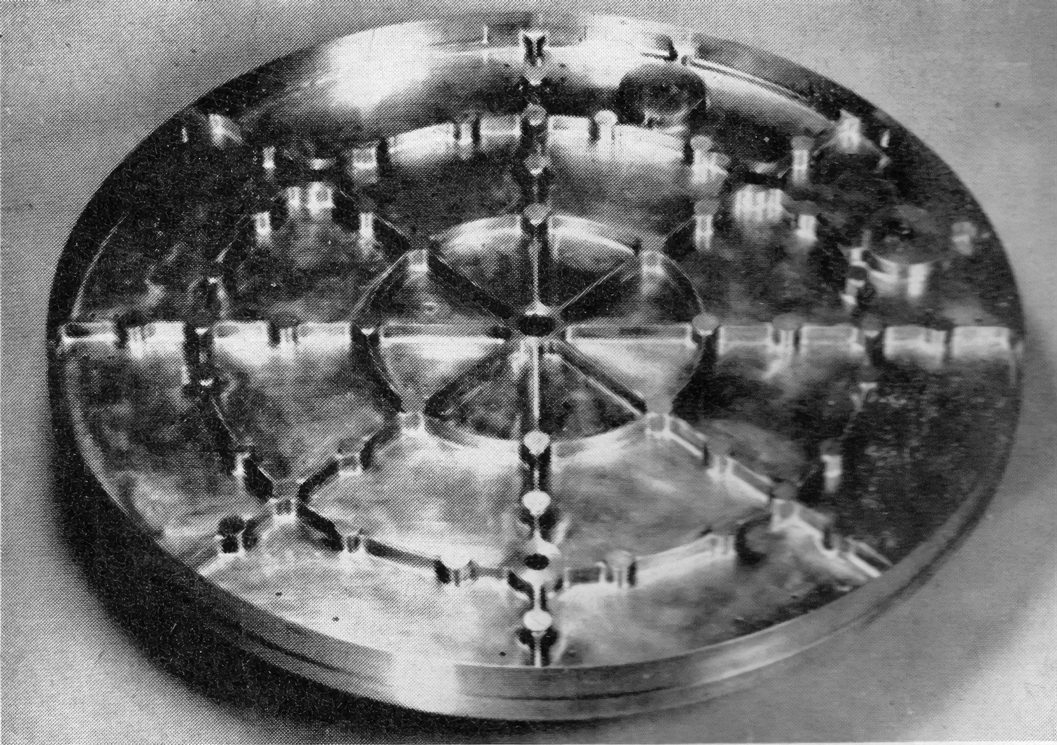
Figure 10 – Le plateau porte-expériences ; entièrement taillé dans la masse, il permet d’assurer la fixité des axes de l’expérience par rapport à ceux des détecteurs stellaires.
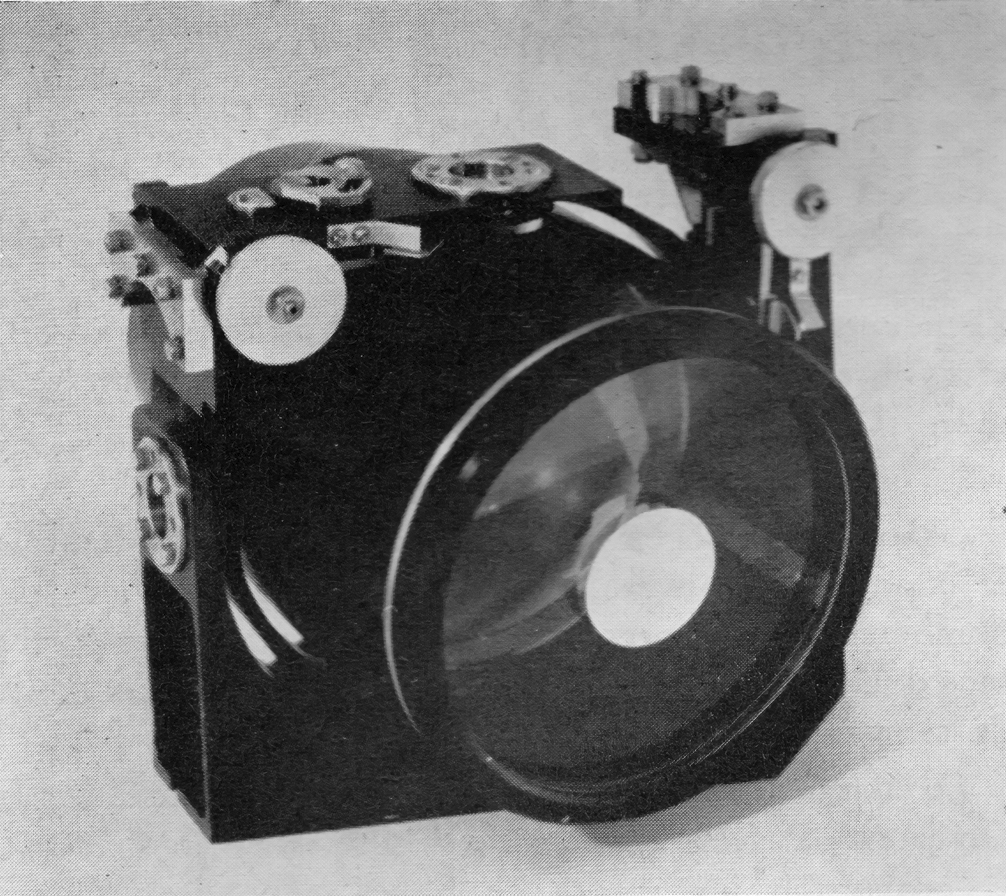
Figure 11 – Un des 2 détecteurs stellaires du bloc de pointage fin (vue de face).
Étant donné les performances remarquables des nouveaux détecteurs stellaires français, compte tenu de leur faible prix de revient, un catalogue de 160 étoiles utilisables a été dressé, toutes de magnitude inférieure à 3. Le choix des couples d’étoiles pour le pointage triaxial fin a donné lieu à l’établissement, d’après des programmes sur ordinateur, à une liste de repères utiles, dans toutes les directions du ciel (le système CASSIOPÉE peut fonctionner sous n’importe quelle latitude).
La durée totale de fonctionnement après cette phase d’acquisition peut être égale à 600 secondes, cette période se plaçant au cours de la portion « utile » de la trajectoire, au-delà de 100 km d’altitude.
Si l’astronomie spatiale semble privilégiée pour l’utilisation d’un tel système, la géophysique trouve également un intérêt, soit qu’on ait besoin d’orienter des capteurs dans la direction du champ magnétique, soit qu’on veuille observer ou balayer des tranches déterminées de l’atmosphère (étude de la luminescence atmosphérique), ou encore qu’il faille fixer un astre pour déterminer la loi de transmission dans l’atmosphère des radiations qu’il émet.
Défini, essayé et utilisé sur des fusées-sondes, le système CASSIOPÉE pourrait encore être utilisé comme ensemble de guidage à bord d’une case d’équipements d’un satellite, pendant les instants précédant immédiatement l’injection sur orbite ; il remplirait ainsi une partie du rôle classiquement confié au dernier étage de la fusée porteuse. Cependant son poids serait alors à retirer de la charge totale satellisable.
Enfin son emploi comme organe de détection et calcul d’un système de pilotage pour fusée-sonde est envisagé.
Il faut d’autre part signaler que, parce que le contrôle est finalement obtenu par un système qui fonctionne en tout ou rien, la précision dans la direction de pointage est en fait limitée par les oscillations lentes (période de 10 s environ, selon les caractéristiques inertielles de la charge utile) de la pointe autour de l’axe de visée, avec une amplitude de ±0,25 degré en pointage grossier et de 1mn en pointage fin ; ces oscillations portent le nom de cycle limite de pointage (les caractéristiques données ici pour ce cycle limite ainsi que pour la précision de pointage ne le sont qu’à titre d’exemple ; elles sont en effet réglables dans une très large plage).
Ajoutons, pour donner une indication sur la vitesse d’acquisition de CASSIOPÉE, que la première tâche dont le système s’acquitte après le lancement, l’arrêt de la rotation de la fusée sur elle-même, ne lui demande pas plus de 4 secondes et que le temps total d’acquisition de la direction de visée en pointage fin est inférieur à 30 secondes dans les cas les plus défavorables.
Article rédigé par C. Poher, e la Direction des Programmes et du Plan du CNES.
Article paru dans la revue CNES « La recherche spatiale » – Volume VII – N°10 – Octobre 1968